

Diferencia entre el radar y el sensor TOF
- 3780
- 156
- Elvira Arteaga
El análisis de imágenes 2D es muy útil en una amplia gama de aplicaciones de visión artificial, como diagnósticos médicos, pruebas de vehículos sin conductor, lectura de código de barras, etc. Sin embargo, muchas veces necesita crear una imagen 3D de un objeto para aplicaciones como logística, robótica y vehículos autónomos. Afortunadamente, muchas tecnologías de imágenes diferentes están en uso generalizado y son capaces de proporcionar información 3D para muchas aplicaciones de visión artificial. TOF es una técnica popular de imágenes sin escáner que utiliza pulsos ópticos de alta potencia para capturar información de profundidad. Echamos un vistazo a cómo la tecnología TOF se compara con la tecnología de radar.
¿Qué es el sensor de radar??
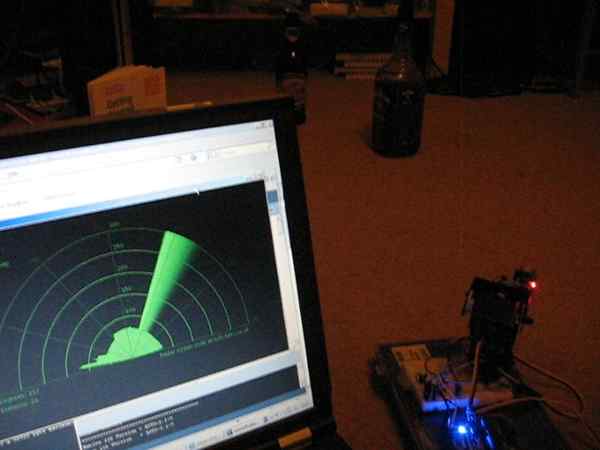
La detección de radio y el rango, o simplemente llamado radar, es un sistema de detección y detección activo que utiliza ondas de radio para localizar objetivos, su ángulo y velocidad a distancias relativamente más largas. Esto es similar a un fenómeno mientras gritas mientras estás parado en un acantilado y escuchas tu propia voz rebotando. Esto se debe a que a medida que las ondas de sonido producidas por su voz alcanzan la superficie de la roca, regresan rebotando, que es un eco. Entonces, cuando sustituyes las ondas de radio por ondas de sonido, así es exactamente como funciona un radar. El radar se basa en el hecho de que las ondas de radio, como ondas de sonido y ondas de luz, se reflejan en superficies sólidas.
Un crucero francés fue el primer barco en ser equipado con un sistema de radio de detección de obstáculos en la década de 1930. Una aplicación popular de la tecnología de radar se realiza en el sistema de imágenes de radar que se utiliza para crear imágenes 2D, generalmente para capturar paisajes. Utiliza una antena y una computadora digital, en lugar de una lente de cámara y una película, para capturar imágenes de objetivos, lo que facilita la distinción de un tipo de objetivo de otro, como un ave de un avión o un avión comercial de un luchador chorro.
¿Qué es el sensor TOF??
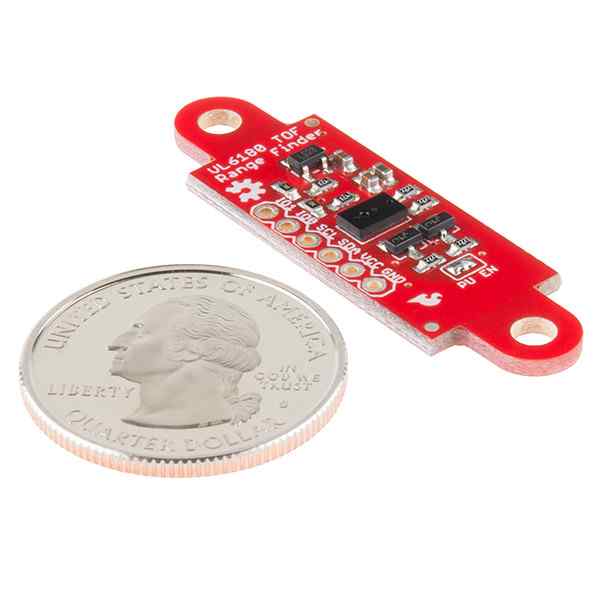
Una cámara de tiempo de vuelo (TOF) es una tecnología de cámara de imagen de gama que utiliza luz infrarroja para determinar la información de profundidad de entornos reales en tiempo real. TOF es una técnica rápida, efectiva y fácil de instalar para las personas y la detección de objetos y sus posiciones y movimiento precisos en 3D. TOF es una tecnología de imagen sin escáner que mide el retraso de fase de la luz infrarroja reflejada. Se basa en los mismos fenómenos que gritas dentro de una gran cueva y escuchas un eco de tu voz a cambio. Los componentes principales de una cámara TOF son una lente, una fuente de luz integrada, sensor y una interfaz. El sensor almacena toda la información de la imagen capturada.
El sistema de cámara TOF puede capturar información de profundidad e información de intensidad a la vez para cada píxel de la imagen. La primera tecnología para realizar la aplicación de la cámara de rango sin escáner basada en el principio de TOF es el intensificador de imágenes modulado que ofrece tanto alta resolución como precisión de submm a tasas de video. Sin embargo, el mayor costo de esta tecnología no permite que esta técnica se utilice en aplicaciones de consumo. La tecnología TOF, en general, se adopta en áreas de aplicación clave, como Electrónica de Consumidor, Automotriz, Atención Médica, Seguridad y Vigilancia, Robótica, etc.
Diferencia entre el radar y el sensor TOF
Tecnología
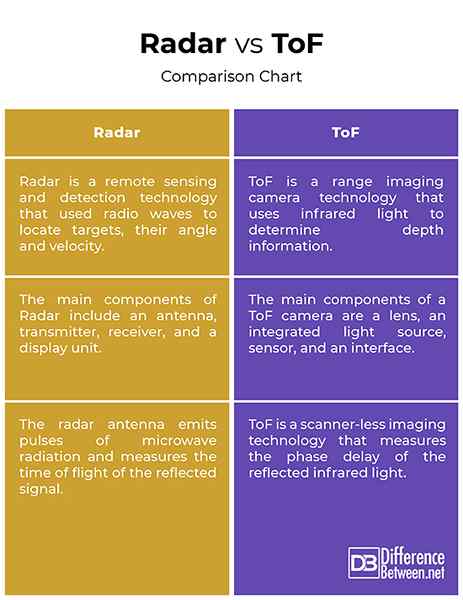
- Si bien el propósito de Radar y TOF es el mismo, para detectar la presencia y el volumen de objetos distantes, la diferencia radica en la tecnología que emplean en sus aplicaciones. El radar, abreviatura de detección de radio e imágenes, es una tecnología de detección y detección de teledetección que utilizó ondas de radio para localizar objetivos, su ángulo y velocidad a distancias relativamente más largas. Tiempo de vuelo (TOF), por otro lado, es una tecnología de cámara de imagen de gama que utiliza luz infrarroja para determinar la información de profundidad de entornos reales en tiempo real.
Principio
- Los componentes principales de cualquier radar funcional incluyen una antena, transmisor, receptor y una unidad de visualización. El principio fundamental sobre el cual funciona el radar es similar al del principio de eco. La antena de radar emite pulsos de radiación de microondas y mide el tiempo de vuelo de la señal reflejada. El radar se basa en el hecho de que las ondas de radio, como ondas de sonido y ondas de luz, se reflejan en superficies sólidas. TOF, por otro lado, se basa en el principio de las fuentes de luz pulsadas y mide el tiempo que tarda un pulso de luz en viajar desde el emisor a la escena y luego de regreso después de que se refleje.
Radar vs. TOF: Gráfico de comparación
Resumen
Mientras que tanto Radar como TOF se basan en los fenómenos de medición de eco mientras grita mientras está parado en un acantilado y escuchas tu propia voz que rebotan, la diferencia radica en el principio subyacente y cómo funcionan. Radar utiliza ondas de radio para localizar objetivos, mientras que un sensor TOF utiliza luz infrarroja para encontrar información de profundidad similar a cómo los murciélagos pueden navegar y detectar su entorno utilizando la ecolocalización. Emiten ondas de sonido a frecuencias que son inaudibles para los oídos humanos, llamados ultrasonido. Se recuperan cuando se golpean por un obstáculo o un objeto.